Muchos seres vivos, como por ejemplo las mariposas, tienen simetría en su cuerpo. A continuación se observa el dibujo de una mariposa y de una recta s, en el cual se puede ver la simetría de sus alas pues, cuando la mariposa las junta, estas coinciden.

Existen distintos tipos de simetría, entre ellas la simetría axial.
Simetría Axial
Es una transformación del plano o del espacio en la cual, a cada punto P, se asocia otro punto P' llamado imagen de P, de manera que P y P' están a igual distancia de una recta llamada eje de simetría, y el segmento PP' es perpendicular a dicho eje.

En la imagen anterior se observa el triángulo A'B'C' que es la imagen simétrica del triángulo ABC respecto aleje de simetría e. Se puede comprobar que:
- El eje de simetría es mediatriz de cualquier segmento que surja de unir un vértice con su imagen, por ejemplo AA'.
-Dos segmentos que sean uno imagen simétrica del otro tienen igual medida, por ejemplo AB= A'B'.
-Los ángulos que sean uno imagen simétrica del otro como el ángulo de B y B' tienen igual medida.
Imagen simétrica de un segmento
La imagen simétrica de un segmento, dado un eje de simetría, se determina hallando la imagen de cada extremo del segmento, luego se traza el segmento que une ambas imágenes.
Ejemplo:
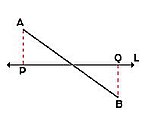
Determinar la imagen simétrica del segmento AB respecto a la recta m.
Procedimiento:
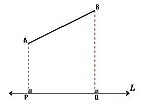
- Se trazan rectas perpendiculares a m por A y B. Se marca el punto A' tal que su distancia al eje m sea igual que del eje m a A. De igual forma para B'.
- Se unen las imágenes A' y B', y el segmento A'B', respecto al eje de simetría m.
La imagen simétrica de un polígono respecto a un eje de una simetría se parece mucho a la imagen de un objeto reflejado en un espejo. Para determinarla se halla la imagen simétrica de cada uno de los vértices del polígono, de la misma forma como se determinó la imagen simétrica de un segmento, luego se unen.
Ejemplo:
Determinar la imagen simétrica del trapecio ABCD respecto a l.
Procedimiento:
- Se determinan las imágenes simétricas A', B', C' y D' de los puntos A,B,C y D respectivamente.
- Se unen los puntos obtenidos para formar el polígono.
Para trazar el eje de la imagen simétrica de una circunferencia se halla la imagen simétrica de su centro respecto al eje y, luego, con el mismo radio, se dibuja la nueva circunferencia. A la derecha se muestra la imagen simétrica de la circunferencia de centro O y radio k, con respecto a m.